北京理工大学和兰卡斯特大学科学家的一篇研究论文展示了利用燃料爆炸作为动力源来实现中型机器人快速有力运动的最新进展。
这篇发表在Cyborg and Bionic Systems杂志上的新研究论文为机器人系统提供了一种新型的驱动系统,提供了有前途的专利性,可以大大提高传统中型机器人系统的工作长度。
“多年来,实现中型机器人的快速快速运动一直是一项具有挑战性的任务,……”在兰开斯特大学(英国)工作并领导这项有趣研究的作者 Nan Ma 解释道。
近年来,已经开发出不同种类的软体机器人以满足不同应用的需求。这些基于软材料的机器人系统与传统的刚性机器人系统相比具有许多优势,例如运动范围 (ROM) 的改进、在非结构化区域的适应性更好、成本更低和重量更轻。通常采用超弹性材料(例如,弹性体)来支持软机器人系统的运动。例如,近年来开发了多种软体机器人来模仿自然界动物的运动(例如,Multigait 软体机器人、大象的躯干机械手),旨在通过它们的多种方式在非结构化环境和地形探索中执行任务。自由度 (DoF) 弯曲能力。然而,它们的长距离和高速直线运动的能力受到它们的结构(例如,由多个弯曲单元构成)和驱动系统(例如,电机或压缩空气)的限制。因此,需要能够实现长距离快速线性触及的新型软体机器人,以开发具有高级功能的机器人系统(例如,具有可伸缩舌头的变色龙的捕食策略)。
同样与驱动相关的是,过去几十年研究了不同的驱动方法,包括电活性聚合物驱动器、形状记忆合金 (SMA) 驱动器和气动驱动器。例如,电活性聚合物致动器可以降低能量消耗并提高膨胀效率。SMA 致动器可以减轻系统的重量和尺寸。气动致动可提供高致动力。对于上述执行器,由于体积大,或响应慢,不适合与软体机器人结合开发先进的可扩展机器人系统,需要快速响应、紧凑的尺寸和强大的输出。有希望地,基于爆炸的致动器可以在封闭空间中使用氢化物的化学分解来自我调节致动压力,从而可以实现高力和线性输出运动。该驱动器结构简单,输出功率大,力重比高,可以省去复杂的传动机构、储能机构和能量释放触发机构,有利于减轻系统整体重量。得益于爆炸式驱动系统的上述优点,选择它作为驱动系统,与开发的直线运动软体机器人相结合,实现快速、远距离运动。该驱动器结构简单,输出功率大,力重比高,可以省去复杂的传动机构、储能机构和能量释放触发机构,有利于减轻系统整体重量。得益于爆炸式驱动系统的上述优点,选择它作为驱动系统,与开发的直线运动软体机器人相结合,实现快速、远距离运动。该驱动器结构简单,输出功率大,力重比高,可以省去复杂的传动机构、储能机构和能量释放触发机构,有利于减轻系统整体重量。得益于爆炸式驱动系统的上述优点,选择它作为驱动系统,与开发的直线运动软体机器人相结合,实现快速、远距离运动。
另一个挑战是如何设计可以由爆炸提供动力以实现直线运动的软体机器人,因为爆炸过程与能量转换过程(例如,化学动力学、气相动力学、流体动力学过程)相耦合,这是系统成功运行的关键。为了解决这个问题,研究人员提出了特殊的设计原则。例如,Michael T. Tolley 展示了一种不受束缚的软体机器人,它使用气动和爆炸式致动器的组合来执行定向跳跃动作。罗伯特·F·谢泼德 (Robert F. Shepherd) 展示了使用化学反应产生爆炸性压力爆发的气动网的快速驱动。然而,据笔者所知,目前尚无以爆炸为动力的软体机器人能够实现远距离高速直线运动。
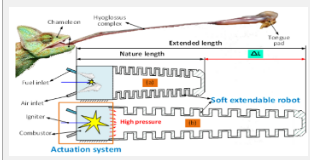
“为了解决软体机器人实现长距离和高速直线运动的上述挑战,提出了一种新型的基于爆炸的软体机器人,”马说,解释了为什么开展这项有趣的工作以及程序是什么参与了新机器人系统的工作。他说,为了支持和预测基于爆炸的软体机器人的性能,构建了一种新的细节动力学模型,可用于定量预测爆炸产生的能量并预测软体机器人的变形。此外,还计算了工作流体(分子数)的变化和一些不可避免的影响因素(例如传热损失、比热和不完全燃烧)。终于,测试了基于爆炸的软体机器人实现轴向伸展的性能,进一步用于验证本文开发的动力学模型。结果表明,所建立的模型能够得到实验结果的验证,可为初期阶段的系统结构设计提供有效的指导。
该论文的作者包括周海琴、曹顺泽、张帅龙、李凤岗和马楠。本论文的工作得到了国家留学基金委和北京理工大学的支持。
标签:
免责声明:本文由用户上传,如有侵权请联系删除!